Operational Optimization, Nonlinear Model Predictive, and Adaptive Control of 14DOF Baxter Robot
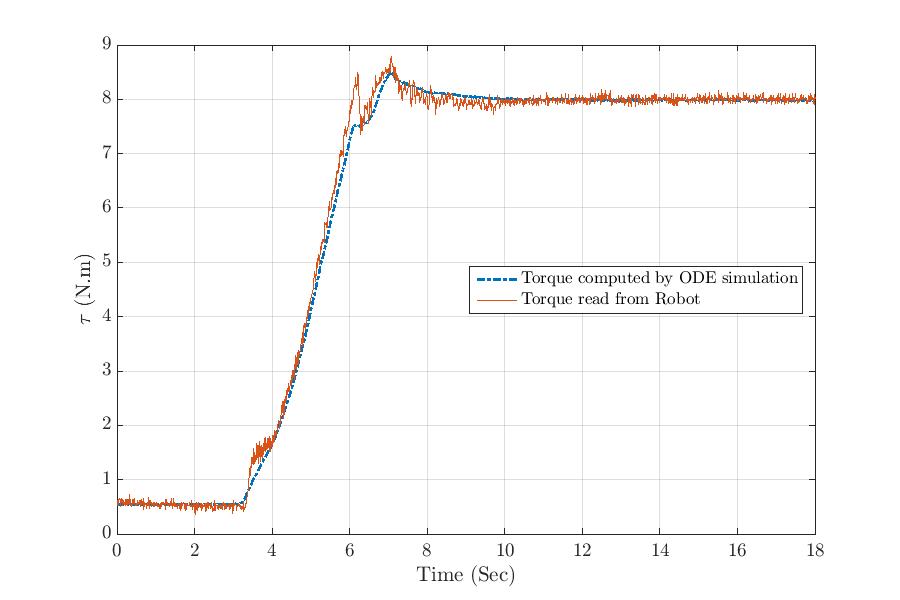
Human-like robot control has received increasing research attention in recent years. Moreover, autonomous robots play highly important roles in modern manufacturing, particularly in assembly lines. In performing these tasks, one of the most significant issues lies in identifying appropriate trajectories. An optimal trajectory needs to be derived with respect to a geometric standpoint (like obstacle-free, the criterion that most path planners focus on), while it satisfies the user's preferences. In this research work, we would design model predictive/optimal adaptive controllers for the humanoid dual-arm Baxter robot. During the first phase, we modeled the robot's kinematics and dynamics (nonlinear ODE equations) and then verified our equations as shown via the following figure.
|
Open Loop Dynamic Simulation
|
Gradient Based Method
|
|
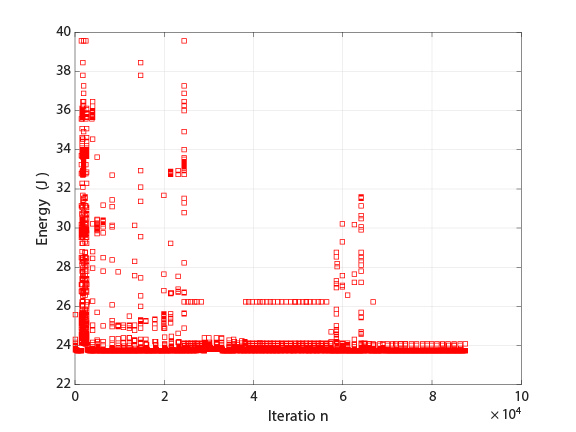
Genetic Algorithm
|
Nominal Operation
|
Efficient and stable operations of electromechanical systems, including bipedal robots and manipulators, have received considerable attention. The importance of the optimal operation can be visualized in a network based robotic system operating simultaneously. A robotic manipulator, which is being analyzed here, is operated for thousands of cycles in industries and even homes as a reliable servant for disabled patients. A significant lumped amount of energy is expectedly consumed in such a network based system and we hence need to minimize it in order to reduce considerable costs of operation and maintenance. In this phase, we carried out both the experimental and theoretical approaches to optimize 14DOFs Baxter Manipulator's operation
using heuristic (genetic) and gradient based algorithms, which we have in Dynamic Systems and Control Laboratory (DSCL) at SDSU. After deriving 3D coupled nonlinear dynamic equations of the robot (which we have experimentally validated) using the Lagrangian method, the lumped amount of energy consumed in the robot, as our defined cost function, was minimized (upward of 20%) enforcing physical constraints only for a given nominal trajectory. It is of a great interest to observe that a desirable critically damped response is obtained even by using an open loop optimization effort.
Finally, the model predictive/optimal adaptive controllers would be implemented to guarantee stable performance of the robot in the presence of disturbances, noises, and uncertainties. The last step would be combining image processing with controller to yield a stable autonomous robot. Therefore, robot would detect the objects, grab them, and then move to desirable locations.
Energy Saving Using Gradient Based Algorithm
| 
Energy Saving Using Genetic Algorithm
|
Bipedal Robots
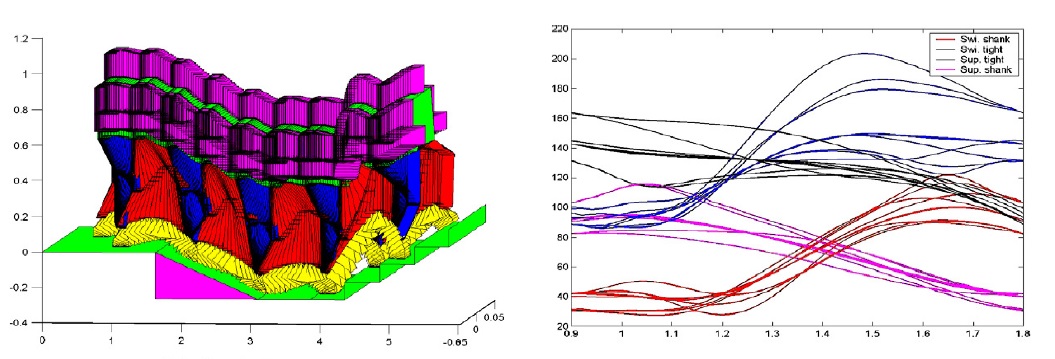
We focused on biped robot simulation and control over combined trajectory paths with the aid of
mathematical modeling methods focusing on the effects of hip height over torso's modified motion. The mathematical simulation
has been exploited to interpolate the combined trajectory of the robot path with the given breakpoints using inverse
kinematic and dynamic methods to determine ZMP and stability treatments. After the robot's combined path determination,
a third-order spline is utilized because of its high precision and ability to calculate the kinematic, dynamic and control
parameters. With the aid of this software, common parameters such as joint angles and inertial forces for the given specifications
and nominal conditions are calculated and simulated.

|
|